Relativistic Kinematics
Matrices
Review of Matrix Math
\begin{align} \mathbf{a} & = a_x \hat{\bf{x}} + a_y \hat{\bf{y}} + a_z \hat{\bf{z}}\\ & = a_x \hat{\bf{i}} + a_y \hat{\bf{j}} + a_z \hat{\bf{k}}\\ & = (a_x,a_y,a_z) \\ & = a_1 \mathbf{e}_1 + a_2 \mathbf{e}_2 + a_3 \mathbf{e}_3 \\ & = \sum_{i=1}^3 a_i \bf{e}_i \\ & = \begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix} \end{align}Examples of basic mathematial operations
Addition (and Subtraction):
\begin{equation} \begin{pmatrix} a_{ii} & a_{ij} \\ a_{ji} & a_{jj} \end{pmatrix} + \begin{pmatrix} b_{ii} & b_{ij} \\ b_{ji} & b_{jj} \end{pmatrix} = \begin{pmatrix} a_{ii}+ b_{ii}& a_{ij}+b_{ij} \\ a_{ji}+b_{ji} & a_{jj}+b_{jj} \end{pmatrix} \end{equation}Multiplication
For multiplication, there are some rules:
$$\bf A B = C$$ The number of columns in $\bf A$ has to be the same as the number of rows in $\bf B$. Then: $\bf AB$ will create a new matrix with elements that follow: $$[\mathbf {AB} ]_{i,j}=a_{i,1}b_{1,j}+a_{i,2}b_{2,j}+\cdots +a_{i,n}b_{n,j}=\sum _{r=1}^{n}a_{i,r}b_{r,j}$$An example of multiplication:
\begin{equation} \begin{pmatrix} a_{1} & a_{2} \\ \end{pmatrix} \times \begin{pmatrix} b_{1} \\ b_{2} \\ \end{pmatrix} = a_{1}b_{1}+a_{2}b_{2} \end{equation}Transpose:
\begin{equation} \left[\mathbf {A} ^{\operatorname {T} }\right]_{ij}=\left[\mathbf {A} \right]_{ji} \end{equation} if \begin{equation} \mathbf{A} = \begin{pmatrix}a_{ii} & a_{ij} \\ a_{ji} & a_{jj} \end{pmatrix} \end{equation} Then \begin{equation} \mathbf{A}^T =\begin{pmatrix} a_{ii} & a_{ji} \\ a_{ij} & a_{jj} \end{pmatrix} \end{equation}
Transpose:
Or, in the case of our vectors, if \begin{equation} \mathbf{x} = \begin{pmatrix} x_1 \\ x_2 \\ x_3 \end{pmatrix} \end{equation} then \begin{equation} \mathbf{x}^T = \begin{pmatrix} x_1 & x_2 & x_3 \end{pmatrix} \end{equation}
Galilean Transform in Linear Algebra
\begin{equation} {\begin{pmatrix}x'\\t'\end{pmatrix}}={\begin{pmatrix}1&-v\\0&1\end{pmatrix}}{\begin{pmatrix}x\\t\end{pmatrix}} \end{equation}Other Transforms: Rotations
A vector $\mathbf{r}$
Shown is a vector $\mathbf{r}$ $$ \mathbf{r} = \begin{pmatrix} r_x \\ r_y \\ r_z \end{pmatrix} = \begin{pmatrix} 1 \\ 1 \\ 0 \end{pmatrix}$$ If we wanted to rotate it, we could transform the vector components: $$ \begin{aligned} x & = x' \cos \theta - y' \sin \theta \\ y & = x' \sin \theta + y' \cos \theta \\ z & = z' \end{aligned} $$
A vector $\mathbf{r}$ that has been rotated.
We can express a rotation about an axis as a multiplication of the vector $\mathbf{r}$ with a Rotation Matrix $\mathcal{R}$ $$ \mathcal{R} = \begin{bmatrix}\cos \theta & -\sin \theta & 0 \\ \sin \theta & \cos \theta & 0 \\ 0 & 0 & 1 \end{bmatrix} $$
Rotation of Coordinate Frame
$$ \mathbf{r} = \begin{pmatrix}\cos \theta & \sin \theta & 0 \\ -\sin \theta & \cos \theta & 0 \\ 0 & 0 & 1 \end{pmatrix} \mathbf{r'} $$
$$\begin{pmatrix}\cos \theta & \sin \theta & 0 \\ -\sin \theta & \cos \theta & 0 \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} r'_x \\ r'_y \\ r'_z \end{pmatrix} = ?$$
Properties of a Rotation Matrix
$$ \mathcal{R} = \begin{pmatrix}\cos \theta & \sin \theta & 0 \\ -\sin \theta & \cos \theta & 0 \\ 0 & 0 & 1 \end{pmatrix} $$
$$\mathcal{R}^T \mathcal{R} = \mathbf{1}$$
$$ |R| = 1 $$
The same idea can be applied to our reference frame in the context of Special Relativity
Our Lorentz transformations can also be expressed in a matrix form
$$ \begin{pmatrix} ct \\ x \\ y \\z \end{pmatrix} = \begin{pmatrix} \gamma & \gamma \beta & 0 & 0 \\ \gamma \beta & \gamma & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} ct' \\ x' \\ y' \\z' \end{pmatrix}$$
Let $$\gamma \equiv \cosh \xi \geqslant 1$$ and then since $\cosh^2 \xi - \sinh^2 \xi =1$: $$ \gamma \beta = \sinh \xi$$
The Lorentz transformations are analogous to a rotation between coordinate frames.
$$ \begin{pmatrix} ct \\ x \\ y \\z \end{pmatrix} = \begin{pmatrix} \cosh \xi & \sinh \xi & 0 & 0 \\ \sinh \xi & \cosh \xi & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} ct' \\ x' \\ y' \\z' \end{pmatrix}$$So, we can very succinctly write the entire Lorentz Transformation as: \begin{equation} \pmb{r} = \mathbf{\hat{\Lambda}} \cdot \pmb{r}' \end{equation} where $$r = \begin{pmatrix} ct \\ x \\ y \\z \end{pmatrix} \; \textrm{and} \; r' = \begin{pmatrix} ct' \\ x' \\ y' \\z' \end{pmatrix}$$
and $\mathbf{\hat{\Lambda}}$ is a 4 × 4 matrix that satistfies: \begin{equation} \mathbf{\hat{\Lambda}}^T \cdot \hat{\eta} \cdot \mathbf{\hat{\Lambda}} = \hat{\eta} \label{eq:lambdatransposeetalambda} \end{equation} and \begin{equation} \left| \mathbf{\hat{\Lambda}} \right| = 1 \end{equation} and \begin{equation} \hat{\eta} = \begin{pmatrix} -1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix} \end{equation}
Lorentz Invariant, again
A position four-vector
\begin{equation} \pmb{r} = \left(ct, x, y, z \right) \end{equation}Or in differential form: \begin{equation} \pmb{dr} = \left(cdt,dx, dy, dz \right) \end{equation}
Let's compute: $$ \begin{align} ds^2 & = d\pmb{r}^T \cdot \hat{\eta} \cdot d \pmb{r} \nonumber \\ & = -c^2 dt^2 + dx^2 + dy^2 + dz^2 \end{align} $$
From our new way of writing the Lorentz Transformations, we can have a differential form: \begin{equation} d \pmb{r} = \mathbf{\hat{\Lambda}} \cdot d\pmb{r}' \end{equation}
A Lorentz Invariant: \begin{equation} ds^2 = -c^2 dt'^2 + dx'^2 + dy'^2 + dz'^2 \end{equation}
Proper Time
If an observer is in a reference frame with a $v$ that matches that of some particle: \begin{equation} dr' = \left(c \;dt',0, 0, 0 \right) \end{equation}
We can give this $d t'$ a special significance: $$ dt' \equiv d \tau$$ This is how much time passes on a watch in the translating frame $\mathcal{O'}$
Henceforth: $\tau$ is the proper time: The time measured in the rest frame of the particle.
Proper Time
Every observer can agree on this time.
\begin{equation} ds^2 = -c^2 \; d\tau^2 = -c^2 dt^2 + dx^2 + dy^2 + dz^2 \end{equation}
Divide by: $dt^2$
One observer's time can be related to the proper time, $\tau$: \begin{equation} dt = \gamma d \tau \end{equation} where $\gamma$ is the usual: $$\gamma = \frac{1}{\sqrt{1-\frac{v^2}{c^2}}}$$
Thus \begin{equation} dt \gt d\tau \end{equation}
Index Notation
Let's take a peek at a more advanced way of writing all this:
\begin{equation} \pmb{r} = \left(ct, x, y, z \right) \equiv \left(r^t, r^x, r^y, r^z \right) \end{equation} This is abbreviated using: \begin{equation} \pmb{r} = r^\mu \end{equation} where $\mu$ is an index that takes on the values $t, x, y, z$.
Now, we write our invariant: $$ \begin{align} ds^2 & = d\pmb{r}^T \cdot \hat{\eta} \cdot d \pmb{r} \nonumber \\ & = -c^2 dt^2 + dx^2 + dy^2 + dz^2 \end{align} $$ as a summation:
\begin{equation} ds^2 = \sum_{\mu \in \{t,x,y,z \} } \;\; \sum_{\nu \in \{t,x,y,z \} } dr^\mu \; \hat{\eta}_{\mu \nu} \; dr^\nu \end{equation} ($\hat{\eta}_{\mu \; \nu}$ means to take the $\mu$th row and $\nu$th column of $\hat{\eta}$)
All of these various terms are no longer matrices and vectors, but just regular number, meaning they are commutative, and we can adjust the order of things: $$ \begin{align} ds^2 & = \sum_{\mu \in \{t,x,y,z \} } \;\; \sum_{\nu \in \{t,x,y,z \} } dr^\mu \; \hat{\eta}_{\mu \nu} \; dr^\nu \\ & = \sum_{\mu \in \{t,x,y,z \} } \;\; \sum_{\nu \in \{t,x,y,z \} } \hat{\eta}_{\mu \nu} dr^\mu \; dr^\nu \end{align} $$
Einstein Summation Convention:
If an index appears twice in the same term. than that means we are summing over it: \begin{equation} ds^2 = \sum_{\mu \in \{t,x,y,z \} } \;\; \sum_{\nu \in \{t,x,y,z \} } \hat{\eta}_{\mu \nu} dr^\mu \; dr^\nu = \hat{\eta}_{\mu \nu} dr^\mu dr^\nu \end{equation}
This simplifies our invariant: \begin{equation} ds^2 = \hat{\eta}_{\mu \nu} dr^\mu dr^\nu = \hat{\eta}_{\mu' \nu'} dr^{\mu'} dr^{\nu'} \end{equation} (Primed coordinates are in the $\mathcal{O}'$ system)
And, to be very consise, our transforms are now: \begin{equation} dr^\mu = \mathbf{\hat{\Lambda}}^{\mu}_{\nu'} \; dr^{\nu'} \end{equation}
Experimental
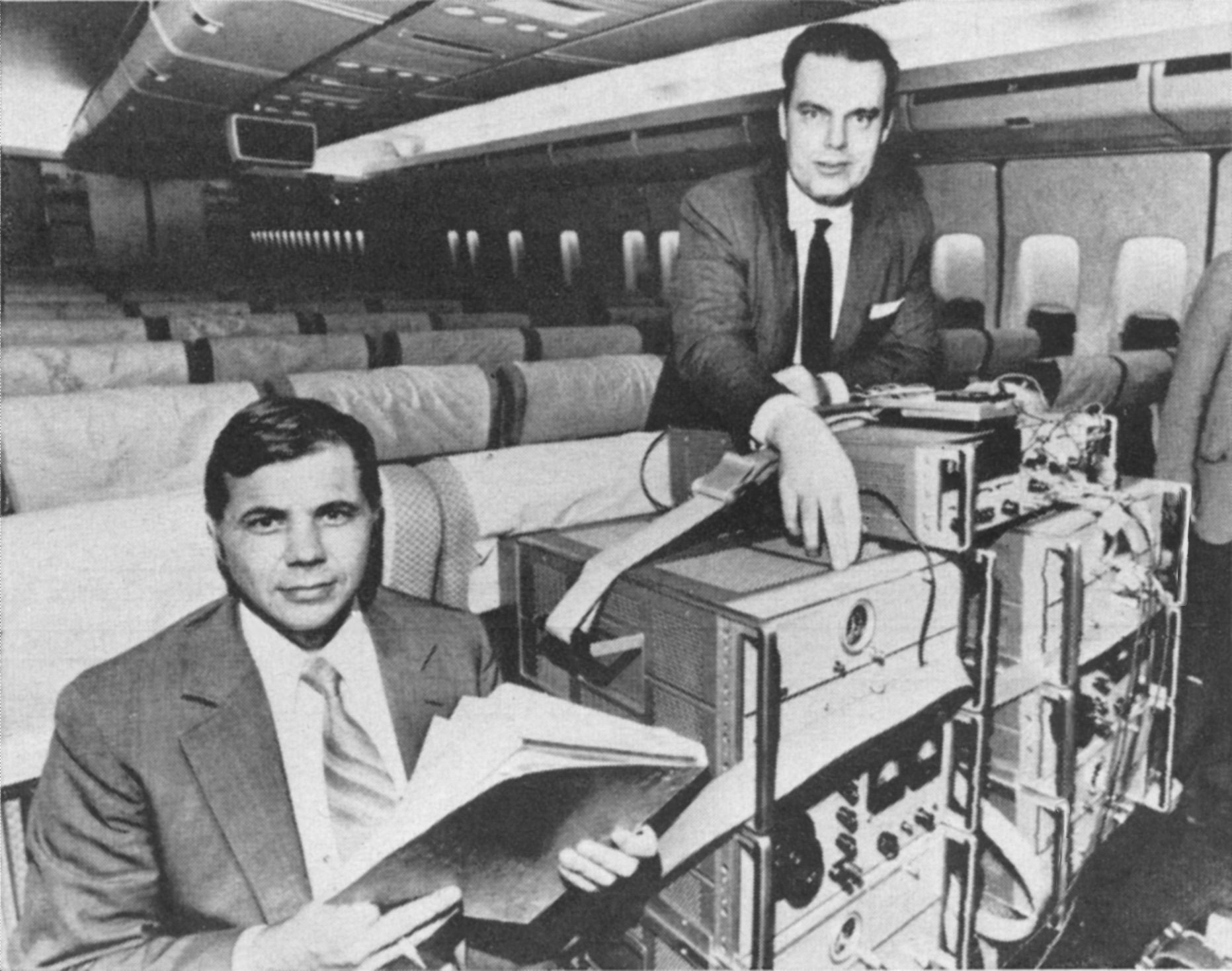
The Hafele–Keating experiment